Индикатор разряда батареи
Вы уже знаете, что регуляторы оборотов имеют функцию плавного отключения при разряде батареи ниже аварийного уровня. Эта функция спасает батарею от глубокого разряда, но способна, погубить квадрокоптер, поскольку от начала плавного снижения тяги до полной ее потери проходит не более 40 с. Этого достаточно, чтобы плавно посадить коптер, находящийся рядом, но вернуть его с дистанции в несколько сотен метров вы уже не успеете. Поэтому наличие индикатора разряда батареи критически валено для безопасных полетов.
Индикаторы разряда бывают двух видов: телеметрийный и звуковой. В варианте с телеметрией напряжение силовой батареи измеряется полетным контроллером или модулем телеметрии, и далее либо передается в общем потоке данных на приемную станцию для отображения на мониторе, либо накладывается на видеоизображение, принимаемое с бортовой камеры. Достоинствами такого метода является точность индикации, обычно до десятых долей вольта, и большая дальность действия, а также возможность приблизительно оценить оставшееся полетное время.
Но телеметрия используется не всегда. При полетах в пределах прямой видимости, когда сохраняется достаточная слышимость, можно (точнее, обязательно нужно!) использовать звуковой индикатор разряда батареи. При достижении порогового значения, но раньше, чем срабатывает отсечка регуляторов, индикатор подает прерывистый звуковой сигнал. Как правило, после этого в распоряжении оператора остается 1–2 минуты полетного времени, чтобы вернуть и посадить коптер.
На индикаторе лучше не экономить и приобрести такой вариант, который подключается к балансирному разъему и контролирует каждую ячейку в отдельности, а также миганием светодиода показывает, какая из ячеек разрядилась раньше (рис. 2.30). Это поможет избежать ситуации, когда одна из ячеек раньше других разрядилась до критического значения, тогда как напряжение батареи в целом остается в пределах нормы. Индикатор лучше всего монтировать в задней части рамы, излучателем в сторону оператора. Желательно выбирать индикатор со специальным громким излучателем.
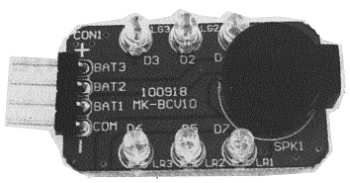
Рис. 2.30.Индикатор разряда батареи с раздельным контролем ячеек
Глава 3
Дополнительные компоненты квадрокоптера
Оборудование видеоканала FPV
Многие владельцы квадрокоптеров не согласятся с тем, что видеооборудование квадрокоптера отнесено ко вторичным аксессуарам, поскольку приобретают или строят коптеры именно ради полетов по видеокамере и/или высотной фотовидеосъемки. Простые полеты в пределах визуального контроля быстро наскучивают, зато полеты с видом "своими глазами" по FPV (Flight Per Video или First Person View) с высоты птичьего полета дают неповторимые ощущения. Оборудование для таких полетов можно дорабатывать почти бесконечно, что само по себе очень интересно.
Видеооборудование коптера в общем случае состоит из следующих компонентов:
• видеокамеры, курсовая и основная;
• видеокоммутатор;
• стабилизированный подвес камеры;
• модуль наложения информации на изображение (OSD);
• видеопередатчик;
• всенаправленная антенна.
• источник питания видеооборудования.
Наземная часть видеоканала также состоит из нескольких компонентов:
• видеоприемник;
• антенны, всенаправленная и направленная;
• система управления положением антенны (трекер);
• видеоочки и/или монитор;
• видеорекордер;
источник питания.
Видеокамеры
Для полетов по FPV в сочетании с видовой или репортажной съемкой удобнее использовать две камеры, курсовую и основную. Курсовая камера легкая, несложная и дает изображение среднего качества. Она монтируется на раме коптера в фиксированном положении, удобном для оператора и направляется слегка под углом к земле. Такая камера имитирует вид из кабины пилота и дает ясное представление о том, куда и под каким углом летит коптер, и есть ли препятствия на пути. На изображение с этой камеры, как правило, накладывается телеметрийная информация.
Основная камера имеет высокое разрешение, обычно FullHD, хорошую оптику и слот карты памяти для записи изображения. На крупных мультикоптерах часто устанавливают фотокамеры профессионального уровня - Canon, Kodak, Sony - способные вести качественную видеосъемку. Для таких камер выпускаются специальные переходники, которые подключаются к разъему управления камеры и приемнику, позволяя управлять режимом камеры дистанционно, с пульта.
Основная камера крепится на стабилизированном подвесе, который сохраняет неизменное положение камеры при кренах коптера, а также позволяет вращать камеру по двум осям, обеспечивая почти полусферический обзор.
Удобство использования двух камер объясняется тем, что эффектную видовую съемку часто приходится вести не под тем ракурсом, который соответствует курсовому положению рамы коптера. В этом случае оператор может легко утратить контроль над пространственным положением коптера и столкнуться с препятствием или неверно оценить направление облета. При профессиональной съемке иногда работают два человека, пилот и видеооператор, а коптер оснащают двумя независимыми видеоканалами и двумя каналами радиоуправления, один из которых предназначен только для управления подвесом и режимами главной видеокамеры.
Видеокоммутатор
Если пилот-оператор один и нуждается в том, чтобы поочередно использовать курсовую и обзорную камеры, то для переключения между камерами применяется видеокоммутатор (рис. 3.1).
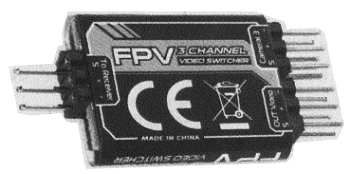
Рис. 3.1.Трехканальный видеокоммутатор
К двум или трем видеовходам коммутатора подключаются различные источники видеосигнала, а вход управления соединяется с одним из каналов приемника. В зависимости от длительности импульсов радиоуправления выбирается соответствующий видеовход, а с выхода сигнал поступает непосредственно на передатчик или модуль OSD.
В простых любительских системах FPV часто используется только одна камера, смонтированная на управляемом по двум осям стабилизированном подвесе.
Стабилизированный подвес
Стабилизированный (динамический) подвес (рис. 3.2) удерживает неизменное угловое положение камеры в пространстве при небольших колебаниях рамы коптера (крены и повороты). Конструктивно подвес камеры представляет собой карданный узел с двумя осями вращения и в простейшем случае может не иметь системы стабилизации, а управляться напрямую с выходов приемника сигналов радиоуправления. Но при этом малейший крен или поворот рамы коптера будет приводить к смещению изображения в кадре, что крайне нежелательно при видеосъемке и часто бывает неудобно при обычном пилотировании по FPV.

Рис. 3.2. Простой двухосевой подвес на сервомашинках
Для стабилизации подвеса по горизонту обычно применяются не гироскопы, которым свойственно накопление ошибки, а трехосевые акселерометры. Для отслеживания поворота по азимуту приходится использовать либо гироскоп, либо комплексный сигнал гироскопа и компаса, поскольку на поворот по курсу акселерометр не реагирует. В простых системах флуктуации по курсу вообще не компенсируются.
При построении системы стабилизации используют один из двух возможных источников данных о положении в пространстве:
• полетный контроллер отслеживает изменения углового положения коптера и вычисляет компенсирующий сигнал для подвеса таким образом, чтобы угловое положение камеры относительно горизонта не изменялось при колебаниях рамы;
• подвес оснащен независимым контроллером с акселерометрами и гироскопами, который отслеживает угловое положение камеры и компенсирует малейшие отклонения.
Первый вариант наиболее очевиден и экономичен, поскольку полетный контроллер уже оснащен необходимыми датчиками ускорений. При таком способе стабилизации отсутствует положительная обратная связь, возникающая вследствие избыточного отклика системы (раскачка). Но, с другой стороны, отсутствие обратной связи порождает высокие погрешности, особенно при быстрых и значительных отклонениях рамы. Быстродействие системы также невысоко, потому что полетный контроллер кроме расчета стабилизации решает множество других задач. Этот вариант системы стабилизации по умолчанию заложен в прошивки популярных полетных контроллеров.
Во втором случае контроллер подвеса по сложности и цене сопоставим с полетным контроллером и требует отдельной настройки параметров отклика под конкретную камеру. Но динамическая стабилизация камеры во втором случае заметно выше.
В качестве исполнительного механизма, вращающего привод, в простейшем случае используются сервомашинки, у которых также много недостатков: высокая погрешность, низкое время отклика, низкий крутящий момент, хрупкий редуктор, ограниченный угол поворота. Сервомашинки обычно применяются в первом варианте системы и подключаются, непосредственно к выводам полетного контроллера.
В последнее время для вращения подвеса применяют бесколлекторные двигатели специальной конструкции (по сути, шаговые двигатели) - рис. 3.3.