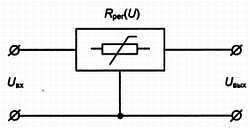
Рис. 2.28.Схема включения линейного стабилизатора
Падение напряжения происходит за счет внутреннего омического сопротивления стабилизатора, поэтому значительная часть драгоценной электрической энергии батареи превращается в тепло и рассеивается в окружающем пространстве. По сути, линейный стабилизатор представляет собой управляемое сопротивление с обратной связью, реагирующее на колебания напряжения на входе и нагрузке. В соответствии с формулой WR = URI, чем больше падение напряжения на сопротивлении и ток в цепи нагрузки, тем больше тепла выделяется на сопротивлении. Очевидно, что при питании пятивольтовой нагрузки от батареи напряжением 12 В на регуляторе падает 7 В, т. е. больше половины. Соответственно, больше половины потребляемой энергии будет напрасно рассеиваться на стабилизаторе в виде тепла. В этом и состоит главный недостаток линейных стабилизаторов - низкий КПД.
Достоинствами линейного стабилизатора являются простота конструкции (в большинстве случаев это микросхема с тремя выводами), малый вес и габариты, дешевизна, универсальность, отсутствие внешних компонентов схемы. Большинство современных микросхем стабилизаторов оснащены встроенной защитой от короткого замыкания и перегрева, иногда от переполюсовки. Поэтому линейные интегральные стабилизаторы по-прежнему широко применяются и во многих случаях незаменимы, поскольку для миниатюрных и маломощных устройств использование более сложных стабилизаторов технически и экономически нецелесообразно. Однако с ростом потребляемого тока или разности входного и выходного напряжений эффективность линейных стабилизаторов катастрофически снижается.
Традиционно принято встраивать интегральные линейные стабилизаторы на плату регулятора оборотов бесколлекторного двигателя. Эта традиция пошла от самолетной практики, для упрощения конструкции и экономии места. В большинство регуляторов оборотов для мультикоптеров их также продолжают встраивать, в результате мы по умолчанию имеем на борту четыре одинаковых источника +5 В, по одному от каждого из регуляторов.
К сожалению, использование этих источников для питания бортовой аппаратуры не всегда приемлемо. Во-первых, регулятор оборотов мотора является источником импульсных помех, проникающих за источник питания. И если для питания полетного контроллера это не критично, то при питании видеокамеры или видеопередатчика эти помехи могут быть заметны на изображении и в канале звука. Во-вторых, регуляторы оборотов и без того нагреваются в полете, иногда довольно сильно. И если нагрузить до предела один из встроенных стабилизаторов, то соответствующий регулятор может перегреться.
Допускается соединять выходы всех встроенных стабилизаторов +5 В параллельно, тем самым равномерно распределяя нагрузку между ними. Это допустимо, если нужно питать только полетный контроллер и приемник. Видеокамеру и аппаратуру видео- и аудиоканала все-таки лучше питать от независимого стабилизатора напряжения, даже если он подключен к той же самой силовой батарее.
Примечание
Еще один важный нюанс: некоторые полетные контроллеры требуют повышенного напряжения питания, не ниже 5,25 В (но не выше 5,6 В) из-за того, что напряжение питания падает на последовательно включенных защитных диодах схемы контроллера. Но на выходе ВЕС, встроенных в регуляторы оборотов, под нагрузкой чаще всего получается 4,85-4,90 В. При таком напряжении питания, например, полетные контроллеры MultiWii AIOP v.2 начинают непредсказуемо сбоить и зависать. Некоторые производители специализированных мультикоптерных регуляторов оборотов учли эту проблему и выпускают регуляторы с повышенным выходным напряжением встроенного ВЕС.
Если у ваших регуляторов оборотов заниженное напряжение источников +5 В, питайте от них сервомашинки, подсветку и т. д., а для питания контроллера используйте отдельный источник.
Импульсные стабилизаторы-преобразователи
В импульсных стабилизаторах постоянное входное напряжение при помощи встроенного генератора и силового ключа преобразуется в импульсы высокой частоты с регулируемой длительностью при неизменной частоте, отношение периода повторения электрических импульсов к их длительности называется скважностью S, а обратная величина 1/S - коэффициентом заполнения. Чем выше коэффициент заполнения, тем больше количество энергии, передаваемой со входа стабилизатора на выход, и тем выше напряжение на выходном каскаде.
Поскольку напряжение регулируется только за счет длительности активных импульсов, а все остальное время ток через силовой ключ регулятора не протекает, то потери энергии минимальны и КПД импульсного регулятора значительно выше, до 95 %.
В отличие от линейного стабилизатора, работающего только с понижением напряжения, импульсные стабилизаторы могут быть как понижающие (Step-Down), так и повышающие (Step-Up), а по типу схемы бестрансформаторные (Switched ВЕС) и трансформаторные (UBEC). Чаще используются бестрансформаторные понижающие преобразователи на ключевом элементе. Структурная схема такого преобразователя показана на рис. 2.29.
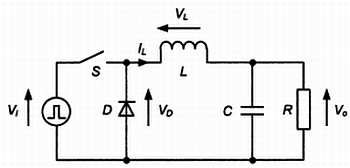
Рис. 2.29.Структурная схема понижающего преобразователя
Управляемый напряжением генератор Viвырабатывает импульсы переменной скважности, которые управляют ключом S. В качестве ключа обычно используются MOSFET-транзисторы с низким проходным сопротивлением канала, что снижает потери энергии на нагрев. Когда ключ замкнут, ток начинает протекать через накопительную цепь из дросселя L и конденсатора С, заряжая конденсатор. Напряжение на нагрузке R равно разности напряжения источника питания и ЭДС самоиндукции дросселя, ток через дроссель растет, как и напряжение на конденсаторе и нагрузке.
При размыкании ключа ток самоиндукции дросселя продолжает протекать через нагрузку в том же направлении через диод D, а также через нагрузку протекает ток разряда конденсатора. Далее цикл повторяется. Чем выше коэффициент заполнения импульсов, тем выше напряжение на конденсаторе и нагрузке. Генераторы импульсных преобразователей работают на высоких частотах, от сотен килогерц до единиц мегагерц, что позволяет снизить габариты накопительного дросселя и конденсатора.
Встроенная цепь обратной связи генератора отслеживает выходное напряжение и при падении напряжения на нагрузке увеличивает длительность импульсов, и наоборот. Преобразователь может быть как регулируемым, так и настроенным на заданное выходное напряжение.
Достоинства импульсных преобразователей:
• высокий КПД;
• широкий диапазон входных и выходных напряжений;
• возможность плавной регулировки напряжения.
Недостатки импульсных преобразователей надо обязательно иметь в виду.
• При пробое ключа в схеме преобразователя напряжение первичного источника оказывается полностью приложенным к нагрузке и, как правило, выводит ее из строя. Это, пожалуй, самый неприятный и опасный недостаток.
• Импульсные помехи для чувствительного оборудования. Но, как показала практика, рабочие частоты и их гармоники даже у самых дешевых преобразователей не мешают радиоприему и телеметрии на частоте 2,4 ГГц, а также работе GPS/ГЛОНАСС и незаметны на картинке видеокамеры. Низкочастотные каналы связи диапазона 40–70 МГц могут испытывать помехи от преобразователя.
• Более сложная конструкция, больше вес и габариты по сравнению с интегральным линейным стабилизатором.