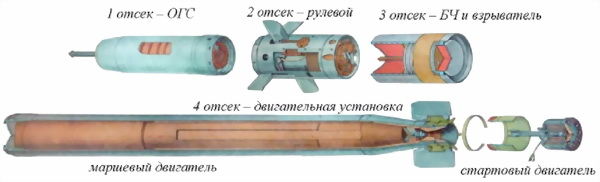
Рис. 17. Отсеки ракеты
Конструктивно ракета 9М39 состоит из скрепленных между собой отсеков (рис. 17):
• В отсеке ОГС размещены три основные системы: координатор цели, следящая система координатора и автопилот (формирователь сигнала управления рулями - ФСУР).
• В рулевом отсеке размещены: рулевая машина с рулями, дестабилизаторы, датчик угловой скорости с усилителем, бортовой источник питания (БИП), пороховой аккумулятор давления (ПАД), пороховой управляющий двигатель (ПУД).
• В отсеке боевой части размещены собственно боевая часть, контактный взрыватель, взрывной генератор и провода электрической связи с БИП.
• В отсеке двигательной установки последовательно расположены двухрежимный маршевый двигатель и стартовый двигатель. С наружной стороны на сопловой блок установлены крылья.
Таблица 5
Основные тактико-технические характеристики ракеты
| 1 | Калибр, мм | 72,2 |
| 2 | Длина, мм | 1639 |
| 3 | Масса, кг | 10,6 |
| 4 | Масса боевой части, кг | 1,27 |
| 5 | Угол зрения ОГС, град. | 2 |
| 6 | Угол пеленга ОГС, град. | ±38 |
| 7 | Скорость выброса из трубы, м/с | 28–30 |
| 8 | Скорость полёта на марше, м/с | 340–570 |
| 9 | Скорость вращения относительно продольной оси, об/с | 12–20 |
| 10 | Располагаемые перегрузки до | 10,2 |
| 11 | Время готовности к пуску, с до | 5 |
| 12 | Диапазон рабочих температур, °С | от –44 до +50 |
Планер
Планер ракеты 9М39 предназначен для решения следующих задач:
1) создания управляющей силы, изменяющей направление полёта;
2) гашения колебаний корпуса, возникающих при управлении;
3) стабилизации ракеты в направлении полёта;
4) поддержания скорости вращения ракеты в полёте;
5) создания подъёмной силы;
6) размещения бортовой аппаратуры.
Планер выполнен по аэродинамической схеме "утка" и состоит из:
• носового обтекателя с аэродинамическим насадком;
• корпуса;
• рулей;
• дестабилизаторов;
• крыльев.
Носовой обтекатель с аэродинамическим насадком предназначен для снижения лобового аэродинамического сопротивления ракеты и пропускания лучистой энергии от цели с минимальными потерями. Обтекатель выполнен из специального стекла в виде мениска. Металлический насадок, кроме снижения сопротивления, ещё и уменьшает нагрев обтекателя.
Корпус планера предназначен для создания подъёмной силы и размещения бортовой аппаратуры. Как уже отмечено, корпус состоит из скрепленных между собой цилиндрических отсеков.
Рули предназначены для создания управляющей силы, изменяющей направление полёта, и гашения колебаний корпуса, возникающих при управлении. Они представляют собой пару аэродинамических пластин из прочной стали. Их форма обеспечивает оптимальное обтекание конструкции сверхзвуковым воздушным потоком и создание управляющей силы требуемой величины. Когда ракета находится в пусковой трубе, рули сложены в отверстия в корпусе рулевого отсека и размыкают цепи блока взведения взрывателя. После выхода вращающейся ракеты из трубы рули под действием центробежных сил и пружин стопоров раскрываются, надёжно фиксируются в рабочем положении и коммутируют цепи питания взрывателя и порохового управляющего двигателя (ПУД).
При одноканальном управлении вращающейся ракетой для создания управляющей силы в любом направлении полёта рули перебрасываются рулевой машиной из одного крайнего положения в другое (на ±15°) 4 раза за один оборот вращения ракеты. Для этого ОГС, определяя ошибку наведения ракеты, формирует релейный сигнал управления рулевой машиной, задающий время нахождения рулей в каждом из 4 крайних положений.
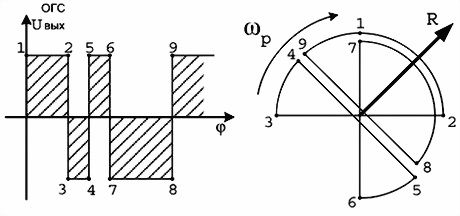
Рис. 18. Создание результирующей аэродинамической силы R в соответствии с управляющим сигналом
Так как на участке разгона ракеты эффективность рулей недостаточна, то предусматривается параллельное газодинамическое управление с помощью двух сопел, расположенных в плоскости, перпендикулярной плоскости рулей, но по разные стороны корпуса. Реактивную силу создают пороховые газы ПУД, истекающие через то или другое сопло. Коммутация сопел осуществляется той же рулевой машиной синхронно с перебросом рулей.
Дестабилизаторы расположены в плоскости, перпендикулярной плоскости рулей, и имеют аналогичную им форму, но меньших размеров, складываются в углубления в корпусе и неподвижны после раскрытия. Они предназначены для оптимизации соотношения устойчивости и управляемости (располагаемых перегрузок) ракеты путём выбора положения центра давления относительно центра масс и поддержания вращения ракеты из-за их разворота относительно продольной оси.
Крылья выполнены в виде крыльевого блока, закрепленного на корпусе сопла маршевого двигателя по схеме "Х-+" относительно рулей. Крыльевой блок предназначен для стабилизации ракеты в направлении полёта, поддержания скорости вращения ракеты и создания подъёмной силы при наличии углов атаки.
Крыльевой блок состоит из корпуса, четырех складывающихся крыльев и механизма их стопорения. Корпус из алюминиевого сплава имеет:
1) отверстия для крепления блока;
2) 4 выступа для крепления стартового двигателя с помощью разжимного кольца;
3) 4 отверстия для установки механизма стопорения;
4) 4 отверстия для установки осей складывания крыльев.
До выхода ракеты из трубы крылья сложены против часовой стрелки. При выходе из трубы крылья под действием центробежных сил раскрываются и надёжно фиксируются механизмом стопорения.
Оптическая головка самонаведения
Оптическая головка самонаведения 9Э410 предназначена для формирования сигнала управления, обеспечивающего пассивное самонаведение ракеты по методу пропорционального сближения.
ОГС представляет собой оптическое приёмное устройство и решает следующие задачи:
1) пространственная селекция целей;
2) спектральная селекция инфракрасного излучения поражаемых целей, ложных тепловых целей (ЛТЦ), фоновых помех и защита от них;
3) преобразование инфракрасного излучения выбранной для обстрела цели в электрический сигнал ошибки слежения, пропорциональный пространственному рассогласованию оптической оси ОГС и линии визирования "ракета - цель";
4) захват и автоматическое сопровождение цели оптической осью (сведение ошибки слежения к нулю);
5) формирование сигнала управления ракетой, пропорционального угловой скорости линии визирования (по методу пропорционального сближения).