Микропрограммирование
Все действия микропроцессора и сигналы на его выводах определяются последовательностью микрокоманд, подаваемых на управляющие входы блока обработки сигналов. Эта последовательность микрокоманд называется микропрограммой.
При изучении принципов работы ОЗУ и ПЗУ приводились временные диаграммы, которые необходимо сформировать для того, чтобы записать или прочитать необходимые данные. Выберем одну из этих временных диаграмм (см. рис. 3.30).
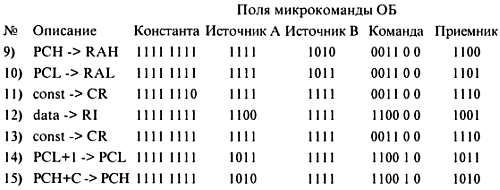
Любую временную диаграмму формирует микропроцессор. Устройство микросхемы, на примере которой мы будем рассматривать формирование необходимых сигналов, было проанализировано при обсуждении операционного блока. По его структурной схеме (см. рис. 4.19) можно определить формат микрокоманды, управляющей этим блоком. Он приведен на рис. 4.20.
Для того чтобы разобраться в приводимых далее микропрограммах, желательно постоянно иметь перед собой временную диаграмму, формат микрокоманды и схему операционного блока.
Работа любого цифрового устройства начинается с заранее заданных начальных условий. Эти начальные условия формируются специальным сигналом RESET (сброс), который вырабатывается после подачи питания. Договоримся, что сигнал сброса микропроцессора будет записывать в регистр программного счетчика PC нулевое значение. Это условие справедливо не для всех процессоров. Например, IBM-совместимые процессоры при сбросе микросхемы записывают в программный счетчик значение F0000h, а процессоры фирмы Motorola заносят в него содержимое ячейки памяти с адресом FFFFh.
Выполнение любой команды начинается со считывания ее кода из памяти (ОЗУ или ПЗУ). Необходимые для этого микрокоманды подаются на входы управления ОБ из БМУ, как только снимается сигнал сброса.
В случае однобайтной команды достаточно считать из системной памяти только код операции и выполнить задаваемые им действия. Временная диаграмма этого процесса приведена на рис. 4.25. Последовательность операций, которые необходимо выполнить микропрограмме, показана стрелочками. Для считывания следующей команды микропрограмма запускается заново (зацикливается).
Для того чтобы считать код операции из памяти, сначала необходимо адрес этой команды выставить на шине адреса. Этот адрес хранится в счетчике команд PC. После сигнала сброса микропроцессора в этом регистре хранится нулевое значение. Скопируем его в регистр адреса RA, выходы которого подключены к шине адреса:

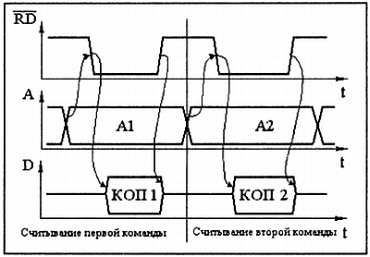
Рис. 4.25.Временные диаграммы сигналов считывания однобайтных команд из памяти
Затем сформируем сигнал считывания. Для этого в регистр управления запишем константу 1111 1110.

При этом на временной диаграмме, приведенной на рис. 4.25, сигнал чтения RD примет нулевое значение. Теперь можно считать число с шины данных, а т. к. память в этот момент выдает на нее код операции, то мы считаем именно его. Запишем его в регистр команд и снимем сигнал чтения с системной шины.
Для этого в регистр управления запишем константу 1111 1111.

Прежде, чем перейти к дальнейшему выполнению микропрограммы, увеличим содержимое счетчика команд на 1.

После считывания команды ее необходимо декодировать. Это можно выполнить микропрограммным способом, проверяя каждый бит регистра команд, и осуществляя ветвление по результату проверки, или включить в состав блока микропрограммного управления аппаратный дешифратор команд, который сможет осуществить переход микропрограммы на любую из 256 ветвей за один такт синхронизации микропроцессора. Выберем второй путь. Восьмым тактом микропрограмма направляется на одну из 256 ветвей, отвечающую за выполнение считанной команды. Например, если это была команда mov A, R0, to следующая микрокоманда будет выглядеть следующим образом:

И т. к. в этом случае команда полностью выполнена, то счетчик микрокоманд сбрасывается для выполнения следующей команды.
Рассмотрим еще один пример. Пусть из системной памяти считывается команда безусловного перехода JMP 1234. Первые восемь микрокоманд совпадают для всех команд микропроцессора. Различие наступает, начиная с девятой микрокоманды, которая зависит от выполняемой машинной команды. При выполнении команды безусловного перехода необходимо считать адрес новой команды, который записан в байтах, следующих за кодом операции.
Этот процесс аналогичен считыванию кода операции:
Теперь считаем второй байт адреса перехода.
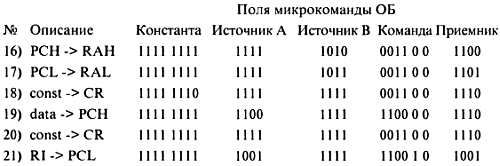
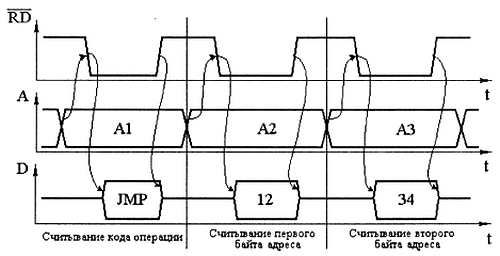
Рис. 4.26.Временная диаграмма выполнения команды JMP 1234
В результате выполнения этой микропрограммы в программный счетчик будет загружен адрес, записанный во втором и третьем байтах команды безусловного перехода JMP 1234. Временная диаграмма, формируемая рассмотренной микропрограммой, приведена на рис. 4.26.
По аналогии с рассмотренными примерами можно разработать другие микропрограммы, которые могут понадобиться в дальнейшем.
Итак, подведем итоги
На этом закончим рассмотрение внутреннего устройства и принципов работы микропроцессора. Полученных знаний достаточно для того, чтобы приступить к рассмотрению принципов работы систем, построенных с использованием микропроцессора.
Глава 5
Принципы работы микропроцессорной системы
В предыдущей главе были рассмотрены принципы работы микропроцессора - универсального устройства, позволяющего выполнять различные виды операций. Как будет показано в следующих главах, с его помощью можно реализовывать цифровые устройства различного назначения. Однако мы пока не умеем использовать микропроцессор. В данной главе будут рассмотрены структурные схемы подключения к нему различных устройств. Структурные схемы приводятся с уровнем легализации, позволяющим легко превратить их в принципиальные схемы.
В главе будут также рассмотрены основные методы расширения адресного пространства микропроцессорной системы и некоторые решения, позволяющие повысить ее быстродействие. Однако не следует забывать, что микропроцессор сам по себе никого не интересует. Это только инструмент решения задач управления какими-либо объектами или обработки сигналов.
В данной случае мы рассмотрим узлы микропроцессорной системы, позволяющие микропроцессору получать информацию извне и воздействовать на окружающую среду (в том числе и на человека). При решении задач управления или обработки сигналов очень важно, чтобы решения процессора были согласованы во времени с окружающими событиями. Поэтому будут рассмотрены узлы микропроцессорной системы, позволяющие организовывать взаимодействие с окружающей средой в реальном времени.
Пожалуй, одним из самых значительных событий в развитии цифровой техники была разработка системной шины, позволяющей передавать информацию между различными блоками цифрового устройства. Именно с нее и начнем изложение материала.
Системная шина
Системная шина предназначена для обмена информацией между микропроцессором и любыми внутренними устройствами микропроцессорной системы (контроллера или компьютера). В качестве обязательных устройств, которые входят в состав любой микропроцессорной системы, можно назвать ОЗУ, ПЗУ, таймер и порты ввода-вывода. Структурная схема простейшей микропроцессорной системы, включающей перечисленные устройства, приведена на рис. 5.1.