
Рис. 2.3.Устройство чувствительного элемента акселерометра и его эквивалентная электрическая схема
Грузик и электроды образуют два конденсатора. При смещении грузика под действием ускорения емкость одного конденсатора уменьшается, а другого увеличивается. Так как заряд конденсаторов постоянен, то изменяется напряжение на выводах конденсаторов. Это изменение измеряется встроенной электронной схемой, результат измерения в цифровом виде выдается в ответ на запрос внешнего вычислительного устройства. Результат может быть как положительным, так и отрицательным в зависимости от направления вектора ускорения.
Реальный сенсор акселерометра устроен значительно сложнее, в нем детали конструкции выполняют несколько функций одновременно. Но для понимания принципа работы упрощенной схемы достаточно.
Все современные интегральные акселерометры, как правило, трехосевые. Три сенсора расположены внутри одного корпуса микросхемы перпендикулярно осям x, у и z. Вектор действующего на устройство ускорения вычисляется микроконтроллером через проекции вектора на три оси. Даже если устройство находится в покое, на него действует ускорение свободного падения g. Вектор g направлен вертикально вниз, к центру Земли. Если корпус акселерометра расположен строго горизонтально, то вектор земного тяготения совпадает с осью z и ускорение действует только на один сенсор. Но стоит наклонить акселерометр, как появятся составляющие вектора g по осям х и у, а составляющая по оси z пропорционально уменьшится. На основании величин проекций вектора земного тяготения на оси и их знака микроконтроллер вычисляет наклон квадрокоптера. Именно по такому принципу ваш смартфон или планшет определяет ориентацию экрана.
Поскольку датчики акселерометра не идеально одинаковые и печатная плата может быть смонтирована не идеально ровно, перед началом эксплуатации акселерометр необходимо откалибровать: поместить устройство строго горизонтально и сообщить бортовому контроллеру, что текущие показания акселерометра соответствуют горизонтали. Соответствующие корректировочные константы записываются во встроенную память микроконтроллера. В этом состоит различие между процедурами калибровки гироскопа и акселерометра: гироскоп калибруют после каждого включения питания, а также при длительном перерыве между взлетами, а акселерометр однократно, после окончания сборки коптера. После смены версии прошивки контроллера или изменения конструкции квадрокоптера акселерометр необходимо откалибровать заново!
Существенным недостатком MEMS-акселерометров является высокая чувствительность к вибрациям. Но вибрации - неизменный спутник винтокрылых аппаратов, поэтому необходимо принимать специальные меры по виброизоляции, а также балансировке воздушных винтов и моторов.
Именно появление доступных по цене трехосевых акселерометров определило взрывной рост популярности квадрокоптеров. Еще несколько лет назад акселерометры были, в основном, двухосевыми, а трехосевые стоили весьма дорого и были редкостью. С появлением игровой приставки Nintendo Wii и игровых манипуляторов WiiMotionPlus и Nunchak ситуация кардинально изменилась. Малогабаритные трехосевые интегральные акселерометры и гироскопы стали доступны по вполне разумным ценам. Первые энтузиасты покупали платы манипуляторов Nintendo и подключали их к вычислителю на основе модуля Arduino. Затем к процессу подключились китайские производители, начавшие массовое производство полетных контроллеров с полным наборов сенсоров "на борту". Отсюда исторически происходит название одной из самых популярных открытых прошивок MultiWii и платы контроллера MultiWii All-In-One (MWIAIOP).
Благодаря тому, что акселерометр определяет положение квадрокоптера относительно горизонтали, становится возможным автоматическое выравнивание устройства (автогоризонт). Как только ручки управления на пульте вернулись в нейтральное положение, полетный контроллер воспринимает это как команду выровнять квадрокоптер в горизонтальное положение, которое вы задали при калибровке.
Есть и другие положительные моменты в использовании акселерометра. Предположим, командой с пульта мы наклонили квадрокоптер для полета вперед. Чтобы компенсировать уменьшение вертикальной тяги, необходимо равномерно увеличить обороты всех моторов пропорционально наклону. При отсутствии акселерометров можно приблизительно вычислить наклон квадрокоптера через угловое ускорение, его продолжительность и величину управляющего сигнала с пульта. Но проще и точнее угол наклона вычисляется по данным с акселерометров.
Разумеется, акселерометры измеряют не только ускорение свободного падения, но и линейные ускорения по любой из осей при движении квадрокоптера. В ряде случаев эта информация тоже бывает полезна.
С другой стороны, когда надо быстро определить скорость и знак углового ускорения, проще использовать гироскоп, который так же выдает эти данные более точно и в готовом виде. Таким образом, каждый сенсор хорош для своей задачи. В современных MEMS-микросхемах трехосевые гироскопы и трехосевые акселерометры часто объединяют в одном корпусе с размерами около 3x3x1 мм. В этом же корпусе находится электронная схема для предварительной цифровой обработки данных, с внешним протоколом обмена SPI или IС.
Чтобы определить курсовое направление рамы квадрокоптера, нужен еще один датчик - интегральный компас, или магнитометр. Квадрокоптер может лететь как угодно, вбок, назад, или по диагонали, поэтому "вперед" в нашем случае - это условное направление рамы и контроллера, относительно которого определяется фактическое направление полета. На плате контроллера направление "вперед" обычно обозначается стрелкой.
Принцип работы интегрального магнитометра (компаса)
В основе конструкции интегрального магнитометра (рис. 2.4) лежит анизотропный магниторезистивный эффект. Чувствительный элемент изготавливается из пермаллоевой пленки, способной изменять свое сопротивление в зависимости от направления протекающего через нее тока и направления вектора ее намагниченности. В свою очередь, вектор намагниченности пленки определяется направлением силовых линий магнитного поля, в котором находится чувствительный элемент.
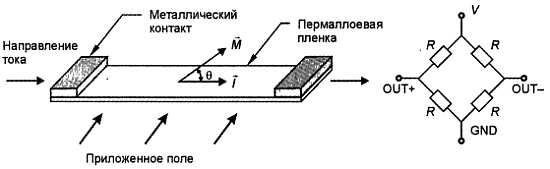
Рис. 2.4. Устройство интегрального магнитометра
Четыре пермаллоевых элемента соединяются в измерительный мост (см. рис. 2.4). При подаче постоянного напряжения на мост датчик начинает измерять интенсивность внешнего магнитного поля, направленного вдоль его чувствительной оси. Мостовой датчик имеет ось предпочтительного намагничивания, так называемую легкую ось, и наиболее чувствителен к полям, направленным перпендикулярно этой оси. В квадрокоптерах применяются трехосевые интегральные магнитометры, состоящие из трех независимых датчиков, ориентированных по трем ортогональным осям и электронной схемы. В спецификации магнитометра всегда указывают направление осей относительно корпуса (рис. 2.5).