GPS NAVSTAR использует кодовое разделение каналов с вещанием кодированных сигналов на нескольких частотах, а ГЛОНАСС - частотное. Но суммарная ширина спектра сигналов ГЛОНАСС даже меньше, чем у GPS, поэтому один и тот же радиочастотный тракт приемника может принимать сигналы обеих систем. Дальнейшее разделение сигналов спутников и выделение полезной информации производится методами цифровой обработки сигнала внутри абонентского приемника. Использование мультисистемных приемников существенно повышает качество навигации, особенно в сложной обстановке (городская застройка, лес, горы).
Принцип определения координат
Определение координат объекта производится путем измерения дальностей до спутников. Рассмотрим пример с тремя навигационными передатчиками А, В и С на плоскости (рис. 3.5).
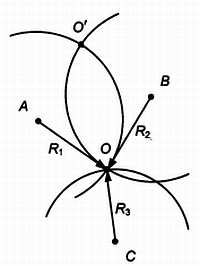
Рис. 3.5.Определение координат на плоскости дальномерным методом
Измерение расстояний RA и RB до передатчиков А и В дает нам две окружности положения с соответствующими радиусами. Объект может находиться как в точке О, так и в точке О'. Добавление третьего передатчика ликвидирует эту неоднозначность на плоскости.
Аналогично происходит определение местоположения в трехмерном пространстве, только вместо окружностей мы имеем пересекающиеся сферы местоположения, которые сложно изобразить на книжной иллюстрации. Постарайтесь представить картину мысленно. Пересечением двух сфер является окружность, на любой точке которой может находиться наш объект. Пересечение трех сфер дает нам пересечение трех окружностей положения в трехмерном пространстве, что порождает неоднозначность в виде двух точек положения. В ряде случаев одну из точек навигационный приемник может сразу исключить, если воспользоваться дополнительной информацией о положении: привязка к наземной станции навигации или сотовой связи, к точке доступа Wi-Fi, ранее сохраненные данные и т. д. Также очевидно, что объект заведомо не может находиться, например, на глубине 300 м под землей. Однако это частности, а в общем случае для определения координат объекта в трехмерном пространстве (ширина-долгота-высота) необходимы как минимум четыре спутника.
Пространственные координаты спутника известны с большой точностью. Чтобы вы оценили точность позиционирования спутников на орбите, отметим, что учитывается давление солнечного света на оболочку спутника, истечение газов наружу из материала оболочки, влияние гравитационного поля Луны и неоднородность гравитационного поля Земли.
Расстояние от спутника до объекта вычисляется умножением скорости света на время прохождения сигнала от спутника до приемника. Но скорость света в вакууме и атмосфере различается. Кроме того, при прохождении через тропосферу и ионосферу радиосигнал испытывает переменные задержки, величина которых зависит от текущего физического состояния верхних слоев атмосферы. Для компенсации переменных задержек применяется передача копии спутникового сигнала на второй частоте. Зависимость задержки от частоты хорошо изучена и точно известна. Но двухчастотные приемники очень дороги, сигнал на второй частоте зашифрован и доступ к его использованию лицензируется. Поэтому в гражданской практике двухчастотные приемники (не путайте с двухсистемными) практически не используются. Кроме атмосферных задержек на определение дальности влияют инструментальные задержки сигнала в цепях передатчика и приемника, ошибки часов спутника и приемника, а также релятивистский эффект, возникающий при движении спутника по орбите. Поэтому фактически приемник работает не с дальностями, а с псевдодальностями до спутников.
Для определения времени прохождения сигнала от спутника часы приемника должны быть очень точно синхронизированы с часами спутника, т. к. расхождение порядка 0,3·10 с дает погрешность 100 м. В общем случае вычислитель приемника решает систему уравнений, в которой четыре неизвестных: три пространственных координаты X, Y, Z и время t. Как известно, для нахождения однозначного решения системы уравнений, их должно быть на одно больше, чем неизвестных. Поэтому для точной синхронизации шкал времени нужны уже пять спутников, а не четыре. Разумеется, задача устранения погрешностей, связанных с переменными задержками, может решаться путем накопления измерений и статистической обработки на основе сигнала от четырех спутников. Но такой подход менее точен и требует существенно большего времени для накопления измерений.
Еще одной серьезной проблемой является прием отраженных сигналов в условиях городской застройки или сильно пересеченного рельефа местности. В некоторых случаях приемник может получать только отраженный сигнал. Наличие отражений приводит к ошибочному определению координат. Для выявления и отбраковки отраженных сигналов желательно, чтобы приемник принимал одновременно сигналы от шести спутников.
Итак, современные модули GPS, применяемые в квадрокоптерах, одновременно обрабатывают сигналы не более чем от шести спутников. Дальнейшее увеличение числа одновременно обрабатываемых спутников существенно усложняет и удорожает приемник, но не дает заметного увеличения точности. Даже если в зоне видимости находятся десять и более спутников, приемник в определенный момент времени будет работать только с шестью. Но наличие "запасных" спутников позволяет приемнику отвергать сигналы, которые он счел отраженными и недостоверными, а также динамически переключаться на сигнал спутников, имеющих более выгодное для навигации геометрическое расположение на орбите в текущий момент. Следовательно, наличие большого количества видимых спутников может улучшить качество услуги позиционирования, хотя и косвенным образом.
Геометрический фактор
Скорость и точность определения местоположения зависят от расположения спутников в пространстве относительно приемника. Наихудшим вариантом является расположение нескольких видимых спутников приблизительно на одной воображаемой линии с приемником. В этом случае погрешность и время определения возрастают до максимума. Поэтому наличие четырех-шести видимых спутников не всегда означает качественное позиционирование даже на открытой местности. Наилучшим вариантом является равномерное распределение нескольких спутников по полушарию над приемником. Применительно к геометрическому фактору, орбитальная структура ГЛОНАСС является более удачной, чем GPS NAVSTAR.
Альманах и эфемериды
Навигационные сообщения спутников несут два типа данных: альманах и эфемериды. Альманах содержит параметры орбит всех спутников, при помощи которых приемник может предсказать расположение спутников с достаточно большой погрешностью и не тратить время на попытки приема сигнала со спутников; которые заведомо не видны. Данные альманаха, передаваемые спутниками, обновляются каждые 30 суток. При хранении в памяти выключенного приемника они действительны не более 2–3 месяцев, далее погрешность в расчетах орбит становится недопустимой.
Эфемериды содержат корректирующие поправки, которые вычисляются наземными станциями слежения и регулярно загружаются в бортовой вычислитель спутника. В отличие от альманаха, каждый спутник передает только собственные эфемериды, обновляемые каждые 30 минут. При хранении в приемнике срок действия эфемерид не более 4–6 часов.
Информация передается со спутника с низкой скоростью, всего 50 бод. Пакет данных содержит контрольную сумму для проверки правильности приема. Также в пакет данных входит флажок "здоровья" спутника (health status). Если спутник неисправен или находится на обслуживании, он продолжает излучать навигационный сигнал для нужд станций слежения, но его сигнал помечается как недостоверный и отвергается приемником.
Время старта приемника, необходимое для перехода в режим определения позиции (GPS Fix или режим захвата спутников), зависит от имеющейся в памяти приемника информации о спутниках.
"Холодный" старт
При "холодном" старте ожидаемая позиция, время, альманах и эфемериды неизвестны. Приемник сканирует все каналы и весь диапазон возможных значений временных задержек навигационных сигналов. После того, как навигационный сигнал хотя бы от одного спутника получен и разобран, приемник обладает информацией о текущем альманахе всей спутниковой группировки и переходит к "теплому" старту.
Время "холодного" старта на открытой местности для современных модулей составляет порядка 30–35 с. При плохих метеоусловиях или мешающих кронах деревьев продолжительность старта может увеличиться до 60–70 с. Таким образом, при использовании приемных модулей на открытой местности можно обходиться без хранения альманаха в памяти и заново стартовать при каждом включении бортового питания. Но в городских условиях время "холодного" старта существенно возрастает, иногда до 10–15 минут.
"Теплый" старт
При "теплом" старте приемник, включенный после 6 и более часов бездействия, начнет сканировать сигналы спутников, используя данные хранящегося в памяти альманаха и время собственных часов. При этом будет осуществляться поиск только тех спутников, которые теоретически, по данным альманаха, должны находиться в видимом полушарии на момент старта. Это существенно сокращает время старта (порядка 10 с), поскольку приемнику достаточно лишь получить текущие эфемериды от заранее известных спутников.
"Горячий" старт