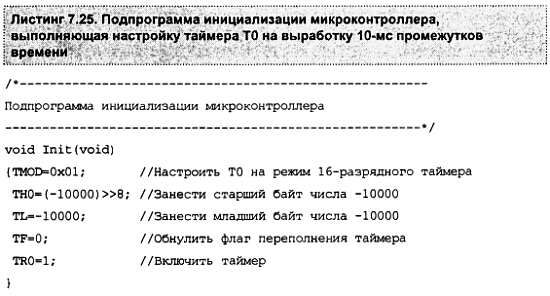
В приведенном примере предполагается, что микроконтроллер работает с частотой тактового генератора 12 МГц. В этом случае на вход таймера Т0 будут поступать импульсы с периодом 1 мкс. Число, которое необходимо загружать в таймер, можно найти как отношение требуемого интервала времени, 10 мс, и периода импульсов на входе таймера, 1 мкс.
Так как таймер Т0 суммирующий, то в регистры таймера будем загружать отрицательное число с абсолютным значением, равным требуемому отношению. В приведенном участке программы (см. листинг 7.25) для выделения старшего байта из 16-разрядного числа использована функция сдвига этого числа на 8 разрядов вправо.
Теперь в тело основного цикла нужно включить участок программы, который будет ожидать окончания работы таймера и только после этого приступать к выполнению следующего прохода по циклу. Это можно сделать при помощи команды, которая будет проверять флаг переполнения таймера TF0. Затем необходимо снова задать следующий интервал времени. Пример программы, в которой один проход по бесконечному циклу будет осуществляться один раз за 10 мс, приведен в листинге 7.26. Иными словами, программа, приведенная в листинге 7.26, реализует схему, изображенную на рис. 7.16.
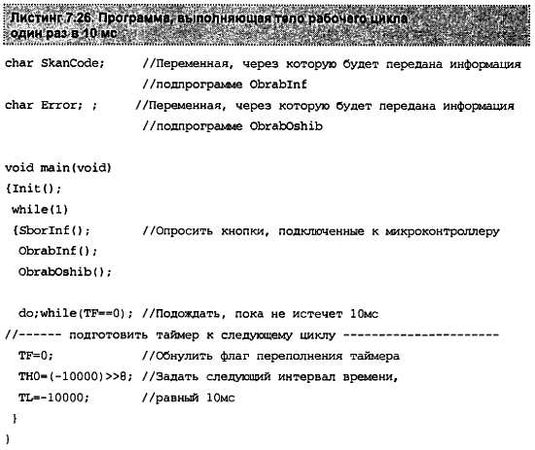

Рис. 7.16.Эквивалентная схема устройства, реализованного программой, приведенной в листинге 7.26
В этой схеме есть три блока, синхронизированные от одного генератора, выполненного на внутреннем генераторе и таймере. Связям между блоками соответствует взаимодействие частей программы при помощи глобальных переменных, изображенных над линями со стрелочками. Порядок выполнения подпрограмм в цикле не важен, т. к. они только подготавливают данные для выдачи на выводы микроконтроллера. Сигналы появятся на выводах микросхемы только в следующем временном слоте, т. е. после завершения реакции системы. Важны только связи между подпрограммами, а они осуществляются глобальными переменными.
Исключение влияния порядка выполнения подпрограмм - важнейший принцип рассматриваемой системы. Время между моментами ввода и вывода сигналов как бы останавливается. И когда бы ни начиналось выполнение подпрограмм, они завершают работу одновременно. Все это верно при условии, что цикл должен успеть завершиться до срабатывания таймера!
Использование глобальных переменных для связи между подпрограммами позволяет осуществлять не только последовательное, но и параллельное соединение аппаратных блоков, реализуемых программно. Пример такого соединения аппаратных блоков мы рассмотрим позднее.
В программе, приведенной в листинге 7.26, процессор все время потребляет максимальный ток, определяемый тактовой частотой микроконтроллера. Чем выше тактовая частота - тем больше ток. Максимальный ток потребляется даже при ожидании срабатывания таймера. В то же время в режиме ожидания микроконтроллер можно перевести в режим пониженного энергопотребления. Это делается записью соответствующего бита в регистр SCON. Выйти из этого режима и продолжить выполнение программы микроконтроллер сможет только по прерыванию от таймера.
При включении питания все прерывания запрещены, поэтому следует разрешить прерывания от таймера. Это достаточно сделать только один раз после включения питания микроконтроллера, поэтому команды, разрешающие прерывания от таймера, нужно поместить в подпрограмму инициализации микроконтроллера. Ее новый вариант приведен в листинге 7.27.
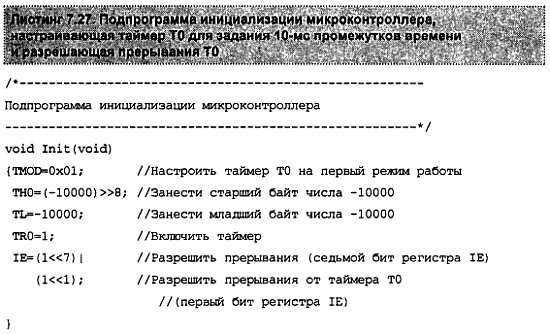
В этой подпрограмме флаг переполнения таймера Т0 не сбрасывается, т. к. после выполнения сброса микроконтроллера этот флаг и так содержит нулевое значение. Разрешение прерываний осуществляется командой записи в регистр ie соответствующего числа. Для разрешения прерываний от таймера Т0 достаточно записать единицу в первый бит этого регистра. Кроме того, для разрешения прерываний необходимо записать единицу в седьмой бит регистра IE, разрешающий или запрещающий все прерывания.
Для тех, кто еще не привык считать в двоичной арифметике и легко переводить двоичные числа в шестнадцатеричные и обратно, в этом примере приведен способ вычисления констант с помощью операции сдвига. Известно, что 2 =1. Тогда операция двоичного сдвига (1 << 5) вычислит константу 2. Нам надо записать единицу в два бита. Необходимую константу можно образовать при помощи операции логического сложения "|". Не нужно пугаться довольно сложного выражения для вычисления константы, записываемой в IE. Оно вычисляется только один раз, на этапе трансляции программы в машинные коды микроконтроллера. В разрабатываемую программу будет помещен готовый результат вычислений. При выполнении программы значение константы уже известно.
Еще одно преимущество приведенного способа записи констант - это возможность снабдить комментарием каждый бит константы, что повышает наглядность программы, а значит - увеличивает скорость ее написания и отладки.
Теперь при переполнении таймера будут возникать прерывания, которые будут передавать управление программой на вектор прерывания. Нам пока ничего не нужно делать по прерыванию, но, тем не менее, подпрограмму обслуживания прерывания для того, чтобы вернуться из прерывания в основную программу, необходимо написать. Пример такой подпрограммы на языке программирования С-51 приведен в листинге 7.28.
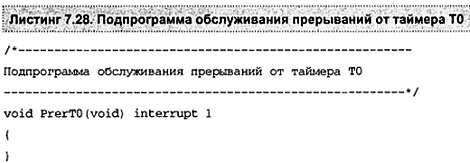
На то, что это подпрограмма обслуживания прерывания, указывает ключевое слово interrupt. Номеру прерывания 1 соответствует конкретный адрес вектора прерывания, где будет размещаться переход на подпрограмму обслуживания прерывания. В приведенном примере это вектор прерывания от таймера Т0.
Теперь все подготовительные операции выполнены, и можно осуществить режим пониженного потребления тока микроконтроллера. У микроконтроллеров семейства MCS-51 есть два режима энергопотребления: остановка процессорного ядра и остановка задающего генератора. В нашем случае останавливать задающий генератор ни в коем случае нельзя, т. к. при этом остановится таймер, и микроконтроллер можно будет разбудить только при помощи аппаратного сброса. Остается только режим остановки процессорного ядра.
Режимы пониженного энергопотребления задаются при помощи двух младших битов регистра PCON. Остановить процессорное ядро можно, записав в нулевой разряд этого регистра единицу. Для того чтобы не изменить содержимое остальных битов этого регистра, воспользуемся операцией логического суммирования. Пример использования режима пониженного потребления тока для задания 10-мс интервалов времени между проходами по основному циклу программы показан в листинге 7.29.
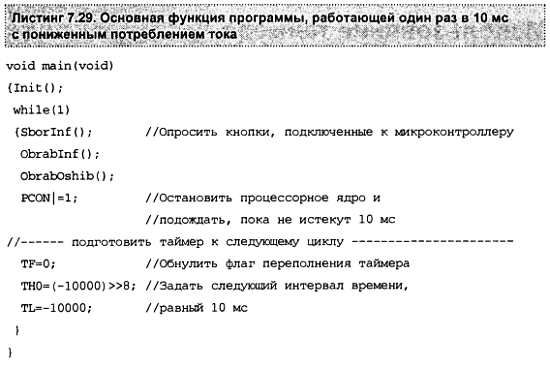
Хотелось бы сразу подчеркнуть, что описанная программа вызывает импульсные помехи с периодом 10 мс. Они распространяются по цепям питания микроконтроллера. В ряде случаев этот фактор критичен и возможно придется отказаться от режима понижения тока потребления в пользу варианта программы, приведенного в листинге 7.26. Если при этом микроконтроллер будет большую часть времени простаивать, то имеет смысл рассмотреть возможность уменьшения потребляемого тока за счет снижения тактовой частоты микроконтроллера. (Следует отметить, что ряд современных микроконтроллеров, например, AduC824, позволяют регулировать частоту работы процессорного ядра непосредственно в процессе работы.)
Достаточно часто программа, написанная для микроконтроллера, реализует несколько режимов работы. Так как в каждый отдельный момент времени требуется только один режим работы, то для каждого из них можно использовать отдельную программу-монитор, вызываемую как подпрограмма из основной программы-монитора. Именно он должен осуществлять переключение между режимами. Поэтому завершение работы любого из режимов должно осуществляться выходом из подпрограммы, реализующей этот режим.
Использование таймера для организации параллельных программных потоков
В рассмотренном примере все время процессора неограниченно принадлежит одной программе-монитору. Это естественно, если время реакции любого алгоритмического блока, входящего в программу-монитор, одинаково. Однако возможны задачи, когда на одном микроконтроллере реализуются алгоритмические блоки, время реакции которых на поступающие от входных портов события должно быть различно. В таком случае используют разбиение времени микроконтроллера на временные слоты (интервалы). Это, как и в предыдущем случае, делается при помощи таймера. Однако для реализации устройства используется несколько подпрограмм-мониторов. Кроме них в состав программы вводится еще один алгоритмический блок - диспетчер. Собственно говоря, этот блок уже присутствовал в предыдущем примере. Это программа, осуществлявшая разбиение времени процессора на строго определенные интервалы.
Пример функциональной схемы устройства, в котором требуется различное время реакции на входное воздействие, приведен на рис. 7.17.